题目内容
(请给出正确答案)
[主观题]
设是两个能控且能观的系统(1) 试分析由所组成的串联系统的能控性和能观性,并写出其传递函数;(
设 是两个能控且能观的系统
是两个能控且能观的系统

(1) 试分析由 所组成的串联系统的能控性和能观性,并写出其传递函数;
所组成的串联系统的能控性和能观性,并写出其传递函数;
(2) 试分析由 所组成的并联系统的能控性和能观性,并写出其传递函数。
所组成的并联系统的能控性和能观性,并写出其传递函数。
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
设是两个能控且能观的系统
(1) 试分析由所组成的串联系统的能控性和能观性,并写出其传递函数;
(2) 试分析由所组成的并联系统的能控性和能观性,并写出其传递函数。
如搜索结果不匹配,请 联系老师 获取答案
 更多“设是两个能控且能观的系统(1) 试分析由所组成的串联系统的能…”相关的问题
更多“设是两个能控且能观的系统(1) 试分析由所组成的串联系统的能…”相关的问题
第1题
已知某系统的传递函数为:
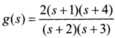 。试分别给出满足以下条件的实现并分析实现的稳定性: (1)求既能控又能观的约当型实现,分析该实现的渐近稳定性。 (2)求一个维数尽可能低的能控但不能观、李雅普诺夫意义下稳定但非渐近稳定的实现。分析该实现的BIBO稳定性。 (3)求一个维数尽可能低的既不能控又不能观、且李雅普诺夫意义下不稳定的实现。分析该实现的BIBO稳定性和渐近稳定性。
。试分别给出满足以下条件的实现并分析实现的稳定性: (1)求既能控又能观的约当型实现,分析该实现的渐近稳定性。 (2)求一个维数尽可能低的能控但不能观、李雅普诺夫意义下稳定但非渐近稳定的实现。分析该实现的BIBO稳定性。 (3)求一个维数尽可能低的既不能控又不能观、且李雅普诺夫意义下不稳定的实现。分析该实现的BIBO稳定性和渐近稳定性。
第3题
已知一系统的动态方程为
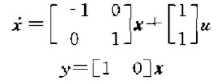
试求:(1)判别系统的能控性和能观性;
(2)求系统的传递函数;
(3)画出系统的状态图;
(4)判别系统的稳定性。
第4题
已知系统的动态方程为:
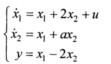 (1)分析参数a对系统的能控性、能观性、渐近稳定性和BIBO稳定性的影响。 (2)当a=1,且系统的状态不可直接量测时,若可能,设计极点均位于-5处的最小维状态观测器。
(1)分析参数a对系统的能控性、能观性、渐近稳定性和BIBO稳定性的影响。 (2)当a=1,且系统的状态不可直接量测时,若可能,设计极点均位于-5处的最小维状态观测器。
第5题
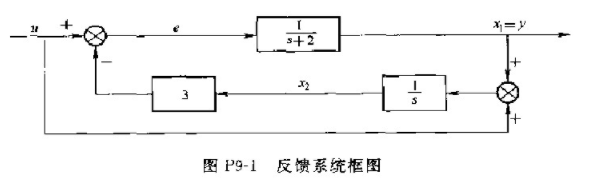
一反馈控制系统如图P9-1所示。其中u为输人量,y为输出量,x1和x2为系统的状态变量。试求:
(1)判别系统的能控性和能观性;
(2)判别系统是否稳定。
第6题
两个子系统的传递函数为

(1)按G1(s)~G2(s)串联时,试分析组合系统的能控性、能观测性;
(2)按G2(s)~G1(s)串联时,试分析组合系统的能控性、能观测性;
(3)按G1(s)~G2(s)并联时,试分析组合系统的能控性、能观测性。
第7题
度。现由2n个部件按下面两种方式(见下图)组成不同的系统
系统1
系统2
假设每个部件的可靠度均为r(0<r<1),且能否工作彼此是相互独立的.试求两个系统的可靠度,并比较其大小。
第8题
对线性定常系统,试证明: (1)状态反馈不改变系统的能控性。 (2)同一传递函数的两个最小实现一定是相互等价的(即它们可通过一个线性变换相互转化)。



为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 赏学吧
微信搜一搜
赏学吧
赏学吧
微信搜一搜
赏学吧














