题目内容
(请给出正确答案)
[判断题]
机器人最大的有效负载为20kg,不是在所有运行范围都可以提取20kg,如果想知道负载范围,可以通过将机器人手臂调整到一条直线上进行负载,也可以参照机器人随机光盘。()
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
 更多“机器人最大的有效负载为20kg,不是在所有运行范围都可以提取…”相关的问题
更多“机器人最大的有效负载为20kg,不是在所有运行范围都可以提取…”相关的问题
第5题
A.承载能力
B.运动范围
C.到达距离
D.重复定位精度
第7题
A.安全栅栏应该安置在机器人最大运动范围内
B.机器人自动运行程序时机器人没有移动表示其程序就已经运行完成
C.对于工作站内用到的水、压缩空气、保护气体等,系统必须配置有监控仪表,以便及时发现供水供气的不正常情况
D.在机器人工作站运行中或者等待中,操作人员可进入机器人工作站的范围
第10题
(1)当R(s)=0时, 确定 对C(s)的影响,指出减少此种影响的方法;
对C(s)的影响,指出减少此种影响的方法;
(2)当N(s)=0, 时, 计算系统在输出端定义的稳态误差,指出减少此种稳态误差的方法。
时, 计算系统在输出端定义的稳态误差,指出减少此种稳态误差的方法。
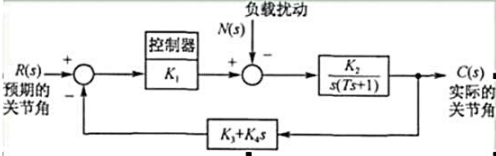
图3-10机器人关节指向控制系统.



为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 赏学吧
微信搜一搜
赏学吧
赏学吧
微信搜一搜
赏学吧













