题目内容
(请给出正确答案)
[主观题]
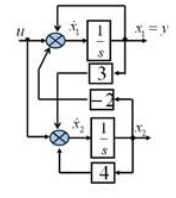
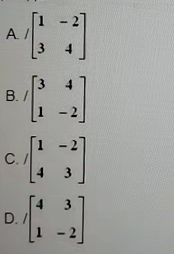
已知系统的控制框图如图6所示。则确定状态方程中A阵为()
已知系统的控制框图如图6所示。则确定状态方程中A阵为()
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
 更多“已知系统的控制框图如图6所示。则确定状态方程中A阵为()”相关的问题
更多“已知系统的控制框图如图6所示。则确定状态方程中A阵为()”相关的问题
第1题
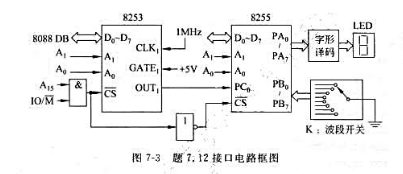
8253各端口的地址.
(2)编写8255和8253的初始化程序。其中.8253的OUT1,端输出100Hz方波,8255的A口为输出,B口和C口为输入。
(3)为8255编写一个I/()控制子程序,其功能为:每调用一次,先检测PC0,的状态,若PC。=0,则循环等待:若PC0= 1.可从PB口读取当前开关K的位置(0~7).经转换计算从A口的PA8~PA7;输出该位置的二进制编码,供LED显示。
第3题
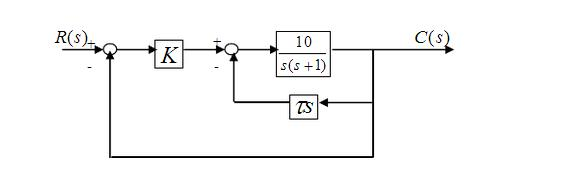
已知控制系统的框图如图3-15所示。要求系统的单位阶跃响应c(t)具有最大超调σ%=16.3%和峰值时间tp=1(s)。试确定前置放大器的增益K及局部反馈系数τ。
第4题
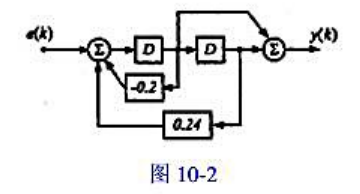
已知某线性非时变因果离散时间系统的框图如图10-2所示,试求:
(1)系统函数H(z)并写出描述该系统的差分方程;
(2)系统的单位函数响应h(k);
(3)当激励e(k)=u(k)时,求系统的零状态响应。
第5题
空间机器人的机械臂及其控制框图如图10-7所示。已知电机与机械臂构成的手臂传递函数为
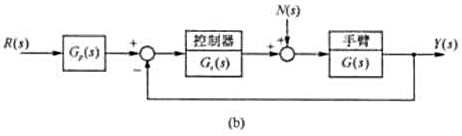
图10-7空间机器 人的机械臂控制系统
设计要求:
(1)当Gc(s) =K时,确定K的合适取值,使系统阶跃响应的超调量σ%=4.5% ;
(2)采用ITAE优化方法,并选取ωn=10,设计合适的PD控制器Gc(s),确定对应的前置滤波器Gp(s);
(3)采用ITAE优化方法,设计合适的Pl控制器Gc(s)和相应的前置滤波器Gp(s);
(4)采用ITAE优化方法和ωn=10,设计合适的PID控制器Gc(s) 和前置滤波器Gp (s);
(5)对比上述每种设计效果,列表比较系统对单位阶跃输入响应的σ%, tpp, ts(Δ=2%)以及由单位阶跃扰动引起的输出y (t) 的最大值和稳态值。
第7题
描述某线性时不变连续系统
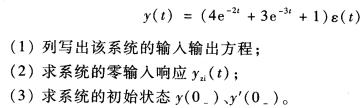
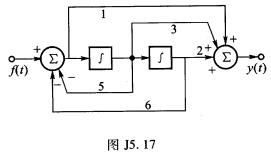 的框图如图J5.17所示,已知当输入f(t)=3(1+e-t)ε(t)时,系统的全响应
的框图如图J5.17所示,已知当输入f(t)=3(1+e-t)ε(t)时,系统的全响应
第8题
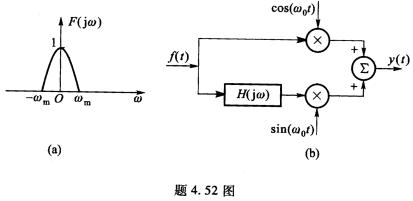
可以产生单边带信号的系统框图如题4.52(b)图所示。已知信号f(t)的频谱F(jω)如图(a)中所示,H(jω)=一jsgn(ω),且ωn>>ωm。试求输出信号y(t)的频谱Y(jω),并画出其频谱图。
第9题
已知某控制系统框图如图8-56所示,其中非线性环节的描述函数为
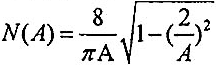
试求:
(1)当系统未接入校正装置Gc(s)时,系统是否存在自持振荡,若存在,求出其振幅和频率,并分析使系统稳定的A的取值范围。
(2)当系统接入校正装置Gc(s)时,分析系统是否会产生自持振荡。
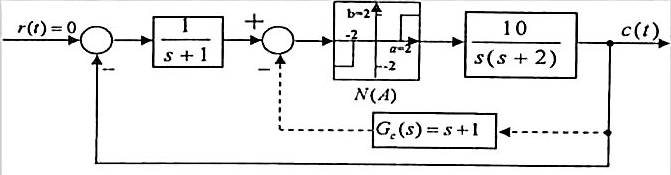
图8-56
第10题
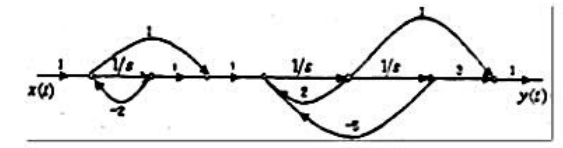
已知一因果LTI系统的信号流图如图9-2所示, 假定系统的输入x(t) =13e-tu(t) 。
(1)系统稳定吗?写出系统的微分方程;
(2)求系统的零状态响应ym(t);
(3) 若系统的全响应为y(t) =(2e-2t-etcos2t+8etsin2t) u(t) , 确定系统的初始状态y(0) 、y' (0_) yn(0) 。



为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 赏学吧
微信搜一搜
赏学吧
赏学吧
微信搜一搜
赏学吧