题目内容
(请给出正确答案)
[判断题]
在不了解机器人运动方向及速度的情况,初次点动机器人,为了更好地观察,人与机器人的距离越近越好。()
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
 更多“在不了解机器人运动方向及速度的情况,初次点动机器人,为了更好…”相关的问题
更多“在不了解机器人运动方向及速度的情况,初次点动机器人,为了更好…”相关的问题
第3题
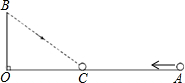
| 你看过机器人大赛吗?在美国旧金山举办的世界机器人大赛中,机器人踢足球可谓是独占鳌头.如图,∠AOB=90°,OA=45cm,OB=15cm,一机器人在点B处看见一个小球从点A出发沿着AO方向匀速前进向点O滚动,机器人立即从点B出发,沿直线匀速前进截小球,在点C处截住了小球,如果小球滚动的速度与机器人行走的速度相等,那么机器人行走的路程BC=______cm.
|
第11题
A.机器人运动学研究的是关节空间和操作空间速度的对应关系
B.机器人运动学是根据机器人关节空间的运动变量求解工作空间的位姿
C.机器人运动学是根据机器人关节空间的运动变量速度求解机械手末端在工作空间的速度
D.机器人逆运动学是根据机械手末端在工作空间的速度求解各个关节的速度



为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 赏学吧
微信搜一搜
赏学吧
赏学吧
微信搜一搜
赏学吧