题目内容
(请给出正确答案)
[主观题]
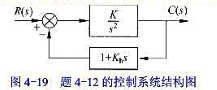
某控制系统如图4-19所示,其闭环极点为2±j,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统
某控制系统如图4-19所示,其闭环极点为2±j√10,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统稳定的K值范围。
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
某控制系统如图4-19所示,其闭环极点为2±j√10,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统稳定的K值范围。
如搜索结果不匹配,请 联系老师 获取答案
 更多“某控制系统如图4-19所示,其闭环极点为2±j,试确定增益K…”相关的问题
更多“某控制系统如图4-19所示,其闭环极点为2±j,试确定增益K…”相关的问题
第1题
设系统结构图如图4-19所示。为使闭环极点位于

试确定增益K和反馈系数Kh的值,并以计算得到的K值为基准,绘出以Kh为变量的根轨迹。
第2题
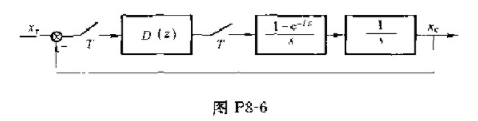
数字控制系统结构图如图P8-6所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2) 时,按最少拍设计,求D(z)表达式,并求
时,按最少拍设计,求D(z)表达式,并求 的级数展开式。
的级数展开式。
第3题
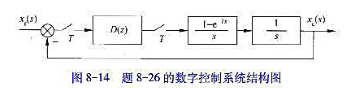
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
第5题
在喷气式战 斗机的自动驾驶仪中,配置有横滚控制系统,其结构图如图3-16所示。要求:
(1)确定闭环传递函数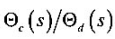 ;
;
(2)当K1分别等于0.7,3.0和6.0时,确定闭环系统的特征根;
(3)在(2)所给的条件下,应用主导极点概念,确定各二阶近似系统,估计原有系统的超调量和峰值时间;
(4)绘出原有系统的实际单位阶跃响应曲线,并与(3)中的近似结果进行比较。
图3-16滚转角控制系统
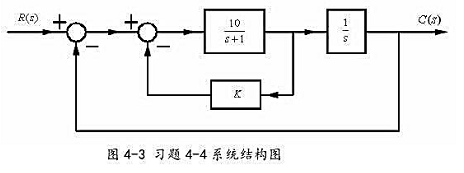
第6题
给定控制系统如图4-3所示,K≥0,试用系统的根轨迹图确定,速度反馈增益K为何值时能使闭环系统极点阻尼比等于0.7。
第7题
环极点s1=s2=s3=-2,且对阶跃输入的稳态跟踪误差为零,最后绘出系统的单位阶跃响应曲线。
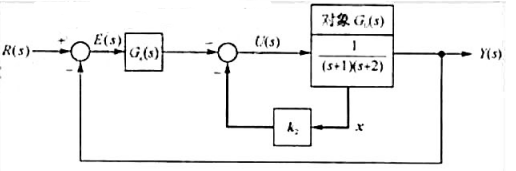
图9-16内膜控制系统
第8题
(1)概略绘出0< Ka<∞时系统的根轨迹图;
(2)确定增益Ka的取值,使系统闭环极点的阻尼比ζ≥0.707。
第9题
设单位斜坡内模控制系统如图9-18所示,其中被控对象
X1(t)和x2(t)为状态变量。试设计合适的内模控制器
及状态反馈增益k3和k4,使系统的闭环极点为S1=S2= S3=S4=-2,且系统对单位斜坡输入的稳态跟踪误差为零,最后绘出系统的单位斜坡响应曲线。
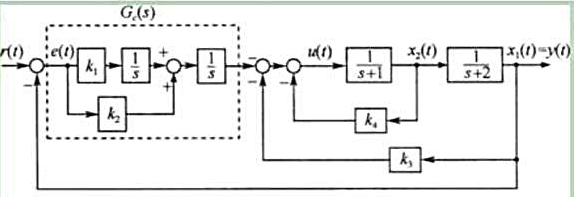
图9-18单位斜坡内膜控制系统
第10题
反馈控制系统如图4-51所示。
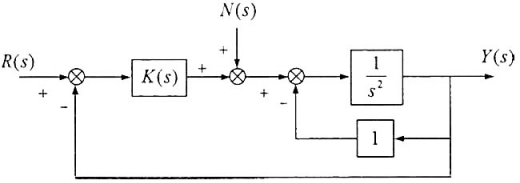
图4-51
(1)试设计控制器K (s),使系统跟踪斜坡参考输入信号R (s)时,具有常值稳态误差。
(2)在题(1)条件下,若系统对干扰信号的稳态误差为零,问N (s)为何种形式的信号?
(3)用根轨迹方法确定题1所设计的控制器K (s)的参数,使①闭环系统稳定:②根轨迹的主要分支过闭环极点-5.85±j4.34。



为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 赏学吧
微信搜一搜
赏学吧
赏学吧
微信搜一搜
赏学吧