题目内容
(请给出正确答案)
[主观题]
设系统状态方程为性能指标为试分别用连续动态规划和调节器方法确定最优控制u* (t)。
设系统状态方程为性能指标为试分别用连续动态规划和调节器方法确定最优控制u* (t)。
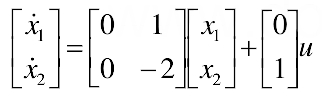
设系统状态方程为
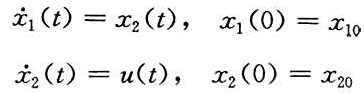
性能指标为
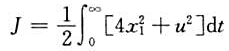
试分别用连续动态规划和调节器方法确定最优控制u* (t)。
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
设系统状态方程为
性能指标为
试分别用连续动态规划和调节器方法确定最优控制u* (t)。
如搜索结果不匹配,请 联系老师 获取答案
 更多“设系统状态方程为性能指标为试分别用连续动态规划和调节器方法确…”相关的问题
更多“设系统状态方程为性能指标为试分别用连续动态规划和调节器方法确…”相关的问题
第3题
设系统状态方程为

试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
第4题
设二次积分模型为

性能指标为
已知θ(0) =ω (0) =1, θ(1) =0,ω (1)自由,试求最优控制u* (t) 和最优轨线θ* (t),ω* (t)。
第6题
设单位反馈控制系统的开环传递函数为

若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统的动态性能指标Mp、tp、tk和稳态性能指标Ky。
第7题
设系统状态方程为:
 试说明可否用状态反馈任意配置闭环极点,若可以,求状态反馈矩阵,使闭环极点位:j[=
试说明可否用状态反馈任意配置闭环极点,若可以,求状态反馈矩阵,使闭环极点位:j[=
 ,并画出状态变量图。
,并画出状态变量图。
第8题
某单位反馈系统的开环传递函数为
其动态性能指标满足ts=6s,σ%=16%。试确定系统的时间常数T及开环放大倍数K的值。
第9题
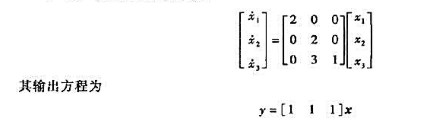
设系统的状态方程与输出方程为

状态转移矩阵为
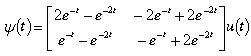
当输入e(t)=σ(t)时状态变量的零状态解和系统的零状态响应分别为
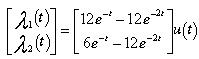 ,r(t)=δ(t)+(6e-t-12e-2t)u(t)
,r(t)=δ(t)+(6e-t-12e-2t)u(t)
求系统的A、B、C、D矩阵。
第10题
设系统微分方程为 式中,u为输入量;x为输出量。
式中,u为输入量;x为输出量。
(1)设状态变量 试列写动态方程;
试列写动态方程;
(2)设状态变换 试确定变换矩阵T及变换后的动态方程。
试确定变换矩阵T及变换后的动态方程。
第11题
线性定常系统的齐次状态方程为
 。试求(1)系统的状态转移矩阵;(2)系统矩阵A。
。试求(1)系统的状态转移矩阵;(2)系统矩阵A。



为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 赏学吧
微信搜一搜
赏学吧
赏学吧
微信搜一搜
赏学吧