题目内容
(请给出正确答案)
[主观题]
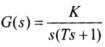
系统结构如图3.62所示,,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统
系统结构如图3.62所示,
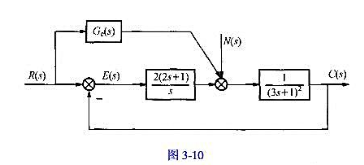
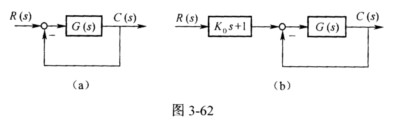 ,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案


![系统结构如图3-1所示,Gs=K/[s(Ts+1)],定义误差e(t)=r(t)-c(t)。(1)](https://img2.soutiyun.com/ask/2020-06-17/961240937618633.png)
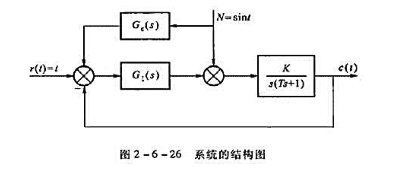
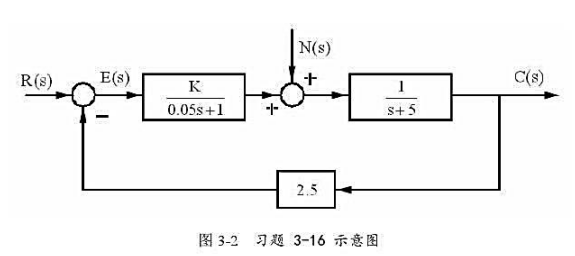

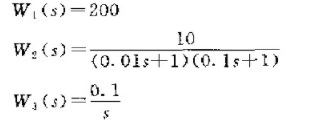
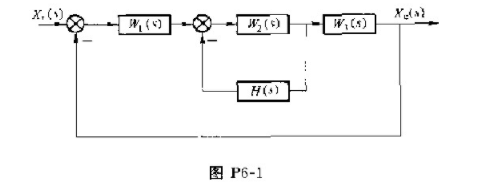
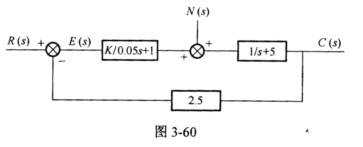 试求: (1)试求K=40时,系统在扰动输入下的稳态输出和稳态误差。 (2)若K=20,其结果又如何? (3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有什么影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有什么影响?
试求: (1)试求K=40时,系统在扰动输入下的稳态输出和稳态误差。 (2)若K=20,其结果又如何? (3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有什么影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有什么影响?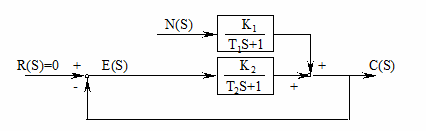
 ;
; 稳态速度误差
稳态速度误差 =0.5%;
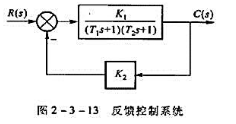
=0.5%; ≥45°试确定反馈校正装置的参数,并求等效开环传递函数。图中
≥45°试确定反馈校正装置的参数,并求等效开环传递函数。图中