题目内容
(请给出正确答案)
[主观题]
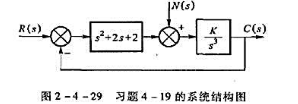
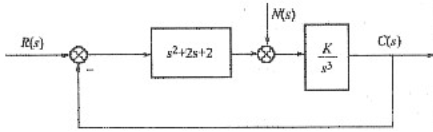
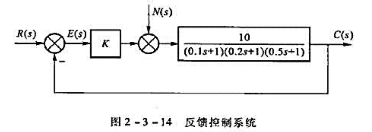
设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K值变化对系统在阶跃扰动作用下响应c(t)
设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K值变化对系统在阶跃扰动作用下响应c(t)的影响。
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K值变化对系统在阶跃扰动作用下响应c(t)的影响。
如搜索结果不匹配,请 联系老师 获取答案
 更多“设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K…”相关的问题
更多“设控制系统如图2-4-29所示,试作闭环系统根轨迹,并分析K…”相关的问题
第1题
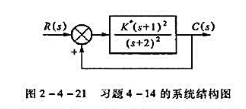
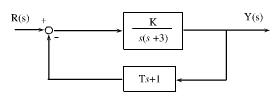
系统结构如下图所示。试画出闭环系统根轨迹,并分析K值变化对系统在单位阶跃扰动作用下响应c(t)的影响。
第3题
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
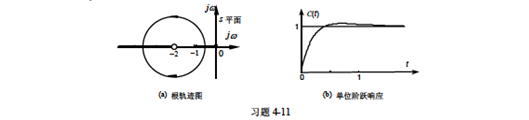
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
第4题
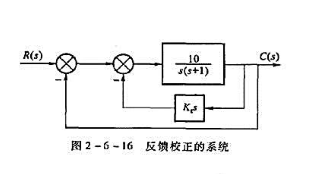
某控制系统如图4-19所示,其闭环极点为2±j√10,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统稳定的K值范围。
第5题
设负反馈系统的开环传递函数为
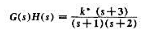
作出系统的根轨迹图,并由根轨迹图分析在不同k*值下系统的阶跃响应曲线。
第7题
设单位负反馈控制系统的开环传递函数为
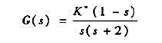
试绘制K*从0→∞的闭环根轨迹图,并求出使系统产生重根和纯虚根的K*值。
第8题
设二阶控制系统的单位阶跃响应曲线如图3-52所示。
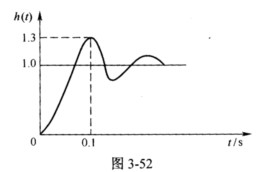 若该系统为单位反馈控制系统,试确定其单位传递函数。
若该系统为单位反馈控制系统,试确定其单位传递函数。
第9题
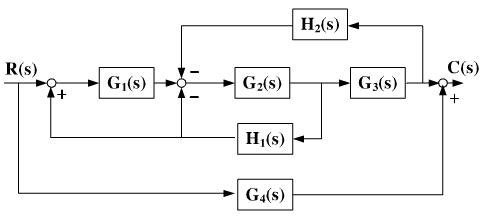
设控制系统结构如图(a)所示,试绘出系统的信号流图,并利用梅森公式确定系统的闭环传递函数。
第10题
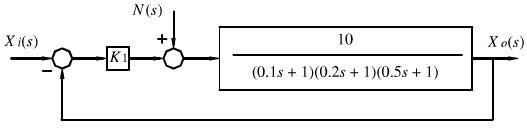
设系统如图3-21所示,其中扰动信号n(t)=1(t)。是否可以选择某一合适的K值,使系统在扰动作用下的稳态误差为essn=-0.099?
第11题
的稳态误差为enn=-0.099?



为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 赏学吧
微信搜一搜
赏学吧
赏学吧
微信搜一搜
赏学吧